Method
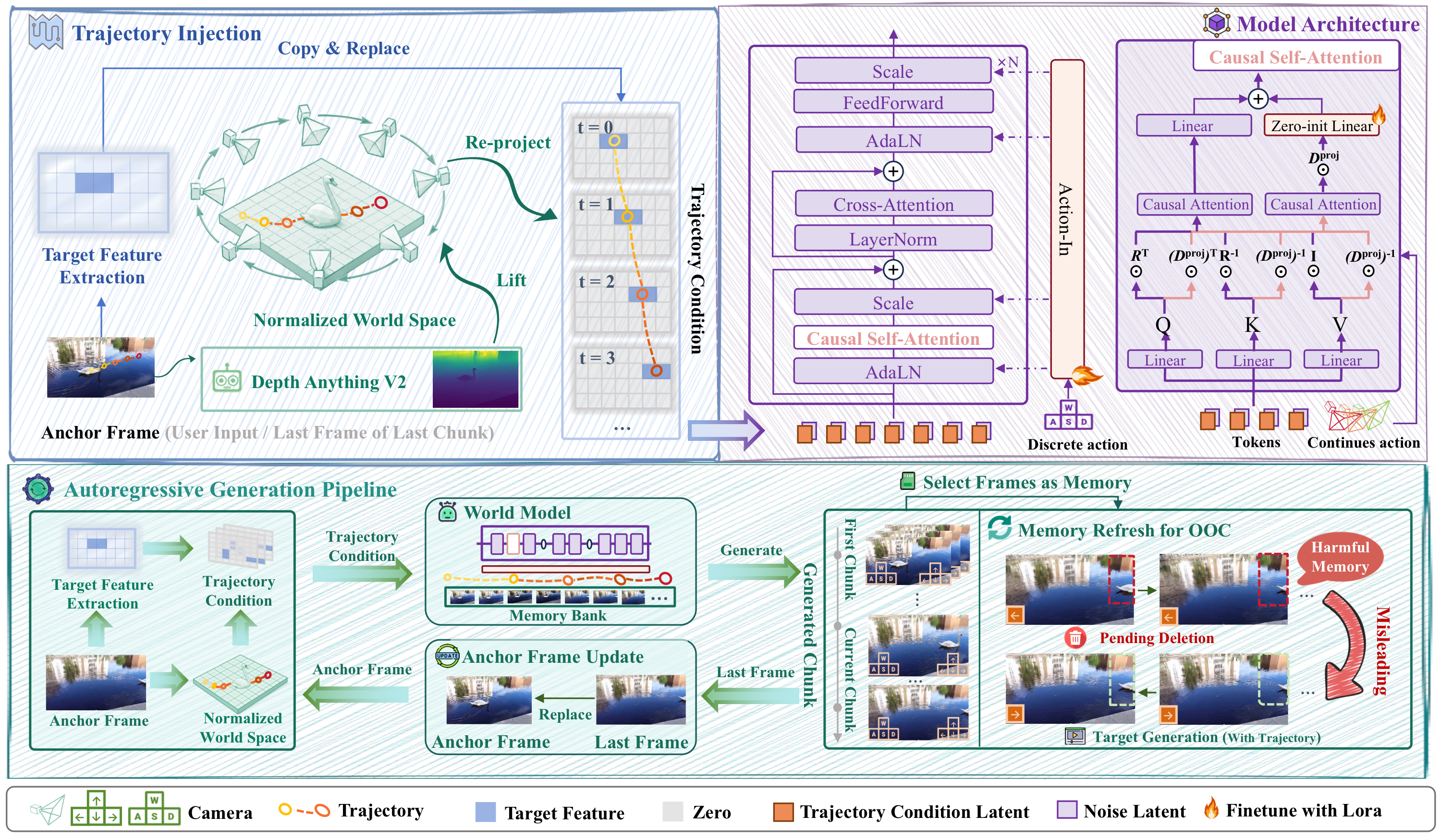
Normalized World Trajectory
Lifts user-drawn 2D paths into a camera-invariant world-space coordinate system and dynamically re-projects them under the current camera pose, decoupling object motion from ego-motion.
Spatial-Pathway LoRA
Adapts only the spatial-control pathway (ProPE + action encoder) with lightweight LoRA, adding object manipulation without overwriting the pretrained camera controller.
Trajectory-Anchored State Persistence
Uses the world-space trajectory as a persistent spatial state signal and refreshes stale memories, so moved objects reappear at correct positions when the camera returns.
| Method | Camera | Object Traj. | Composable | Off-Cam State | Autoregressive |
|---|---|---|---|---|---|
| DragAnything | × | ✓ | × | × | × |
| Wan-Move | × | ✓ | × | × | × |
| GameCraft | ✓ | × | × | × | ✓ |
| Genie 3 | ✓ | × | × | × | ✓ |
| WorldPlay | ✓ | × | × | × | ✓ |
| WorldCraft (Ours) | ✓ | ✓ | ✓ | ✓ | ✓ |
Trajectory Control Comparison
Side-by-side comparison on static-camera trajectory control. All methods receive the same first frame and trajectory condition. WorldCraft achieves precise object-level control while maintaining temporal consistency.

Long-Horizon & Off-Camera
The goose moves right while the camera pans left and then returns. WorldCraft maintains scene consistency and, via TASP, recovers the object at its correct off-camera-updated position. Baselines either lose scene coherence or cannot track object state.

Extended Capabilities



Quantitative Results
| Method | Visual Quality | VBench++ | TE↓ | |||||
|---|---|---|---|---|---|---|---|---|
| PSNR↑ | SSIM↑ | LPIPS↓ | DINO↑ | SubjC↑ | BgC↑ | Temp↑ | ||
| DragAnything | 15.97 | 0.600 | 0.468 | 0.777 | 0.896 | 0.913 | 0.938 | 39.86 |
| Wan-Move | 16.42 | 0.592 | 0.375 | 0.782 | 0.927 | 0.943 | 0.985 | 44.08 |
| WorldCraft (Ours) | 17.23 | 0.616 | 0.363 | 0.807 | 0.942 | 0.945 | 0.989 | 38.90 |
| Method | Short-term (61 frames) | Long-term (253 frames) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| RPErot↓ | RPEtrans↓ | RPEcam↓ | PSNR↑ | SSIM↑ | LPIPS↓ | RPErot↓ | RPEtrans↓ | RPEcam↓ | |
| Yume | 0.261 | 0.0143 | 0.0169 | 12.39 | 0.2931 | 0.5718 | 0.374 | 0.0247 | 0.0285 |
| Matrix-Game 2.0 | 0.342 | 0.0137 | 0.0196 | 12.96 | 0.3235 | 0.5326 | 0.162 | 0.0243 | 0.0261 |
| GameCraft | 0.252 | 0.0130 | 0.0157 | 12.42 | 0.2861 | 0.5529 | 0.198 | 0.0243 | 0.0265 |
| WorldPlay (base) | 0.120 | 0.0155 | 0.0165 | 13.77 | 0.3434 | 0.4700 | 0.130 | 0.0262 | 0.0276 |
| WorldCraft (Ours) | 0.131 | 0.0161 | 0.0170 | 13.95 | 0.3474 | 0.4621 | 0.123 | 0.0225 | 0.0233 |
| Configuration | #Params | TE↓ | RPErot↓ |
|---|---|---|---|
| (a) NWT Representation | |||
| Pixel space (raw user traj.) | — | 35.82 / 40.69 / 45.28 | — |
| World space + single-shot depth | — | 33.82 / 37.69 / 41.28 | — |
| World space + iterative depth | — | 30.82 / 32.10 / 34.65 | — |
| (b) Layer Selection (Static-BI → Dynamic-AR) | |||
| Spatial-pathway LoRA (ProPE + action) | ~50M | 38.90 | 0.131 |
| Spatial pathway + V + MLP (blocks 28-42) | ~120M | 46.60 | 0.136 |
| Q/K/V + MLP (conventional LoRA) | ~200M | 49.43 | 0.139 |
| Full fine-tune | 8B | 37.20 | 0.237 |
Citation
@misc{gu2026worldcraftcameranavigationobject,
title={WorldCraft: From Camera Navigation to Object Manipulation
in Interactive Video World Models},
author={Bohai Gu and Taiyi Wu and Yueyang Yuan and Jian Liu
and Xiaocheng Lu and Dazhao Du and Jie Zhang and Jinxiang Lai
and Shuai Yang and Xiaotong Zhao and Alan Zhao and Song Guo},
year={2026},
eprint={2605.25077},
archivePrefix={arXiv},
primaryClass={cs.CV},
url={https://arxiv.org/abs/2605.25077},
}